SERIE DI PINZE ELETTRICHE HITBOT – Pinza elettrica rotante Z-ERG-20




Categoria principale
Braccio robotico industriale / Braccio robotico collaborativo / Pinza elettrica / Attuatore intelligente / Soluzioni di automazione
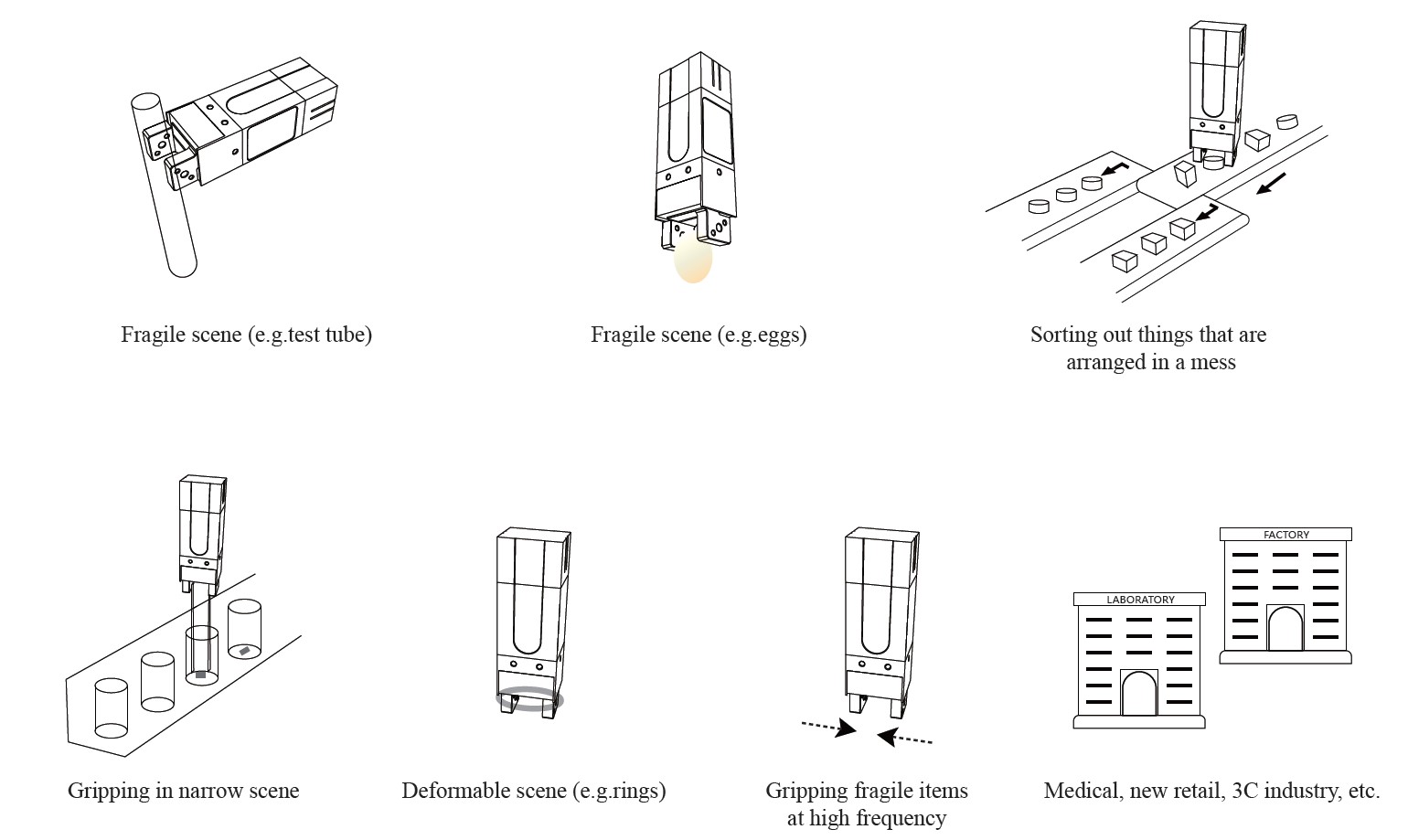
Applicazione
Le pinze robotiche SCIC della serie Z sono di piccole dimensioni e dotate di un servosistema integrato, che consente un controllo preciso di velocità, posizione e forza di serraggio. Il sistema di presa all'avanguardia SCIC per soluzioni di automazione vi aprirà nuove possibilità di automazione per attività che non avreste mai pensato possibili.
Caratteristica

·Supporta la rotazione infinita e la rotazione relativa, nessun anello di contatto, bassi costi di manutenzione
·La rotazione e la forza di presa, la posizione e la velocità possono essere controllate con precisione
·Lunga durata, cicli multipli, prestazioni migliori rispetto alla pinza prenumatica
·Controller integrato: occupa poco spazio ed è facile da integrare
·Modalità di controllo: supporta il controllo del bus Modbus e I/O



Parametro di specifica
Il manipolatore Z-ERG-20 è facile da usare con le persone e supporta la presa morbida. La pinza elettrica è altamente integrata e offre numerosi vantaggi:
●Supporta la rotazione infinita e la rotazione relativa, nessun anello di contatto, bassi costi di manutenzione.
●È possibile controllare con precisione la rotazione, la forza di serraggio, la foratura e la velocità.
●Lunga durata: decine di milioni di giri, meglio dei compressori d'aria.
●Controller incorporato, per risparmiare spazio, facile da integrare.
●Modalità di controllo: supporta Modbus e controllo I/O.
| Modello n. Z-ERG-20 | Parametri |
| Corsa totale | 20 mm regolabile |
| Forza di presa | 10-35N regolabile |
| Ripetibilità | ±0,2 mm |
| Peso di presa consigliato | ≤0,4 kg |
| Modalità di trasmissione | Cremagliera + Guida lineare |
| Rifornimento di grasso dei componenti mobili | Ogni sei mesi o 1 milione di movimenti / volta |
| Tempo di movimento della corsa unidirezionale | 0,20 secondi |
| Coppia massima rotante | 0,3 Nm |
| Velocità massima di rotazione | 240 giri/min |
| intervallo di rotazione | Rotazione infinita |
| Gioco rotante | ±1° |
| Peso | 1,0 kg |
| Dimensioni | 54*54*141mm |
| Tensione di esercizio | 24 V ± 10% |
| Corrente nominale | 1,5A |
| Corrente massima | 3A |
| Energia | 50W |
| Classe di protezione | IP20 |
| Tipo di motore | Servomotore |
| Intervallo di temperatura di esercizio | 5-55℃ |
| Intervallo di umidità operativa | RH35-80 (No frost) |
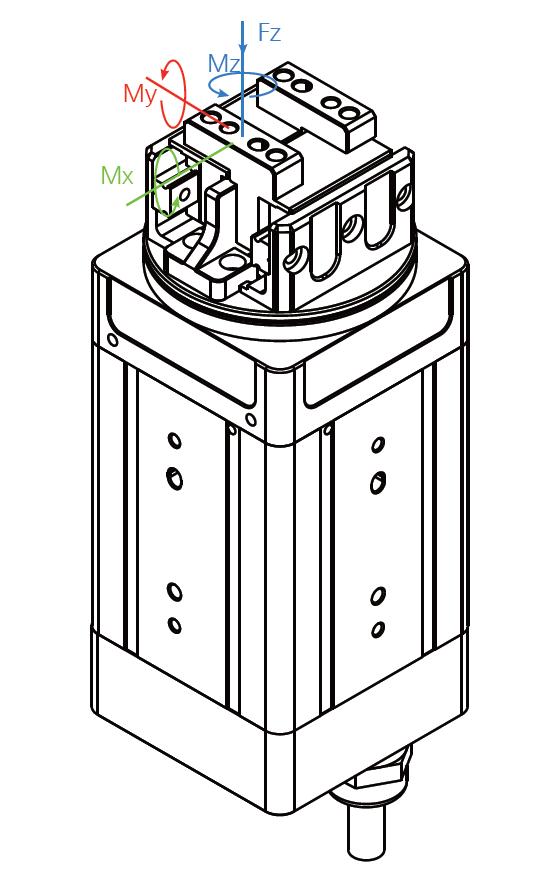
| Carico statico ammissibile in direzione verticale | |
| Fz: | 100N |
| Coppia ammissibile | |
| Mx: | 1,35 Nm |
| Mio: | 0,8 Nm |
| Mz: | 0,8 Nm |
Offset del baricentro del carico
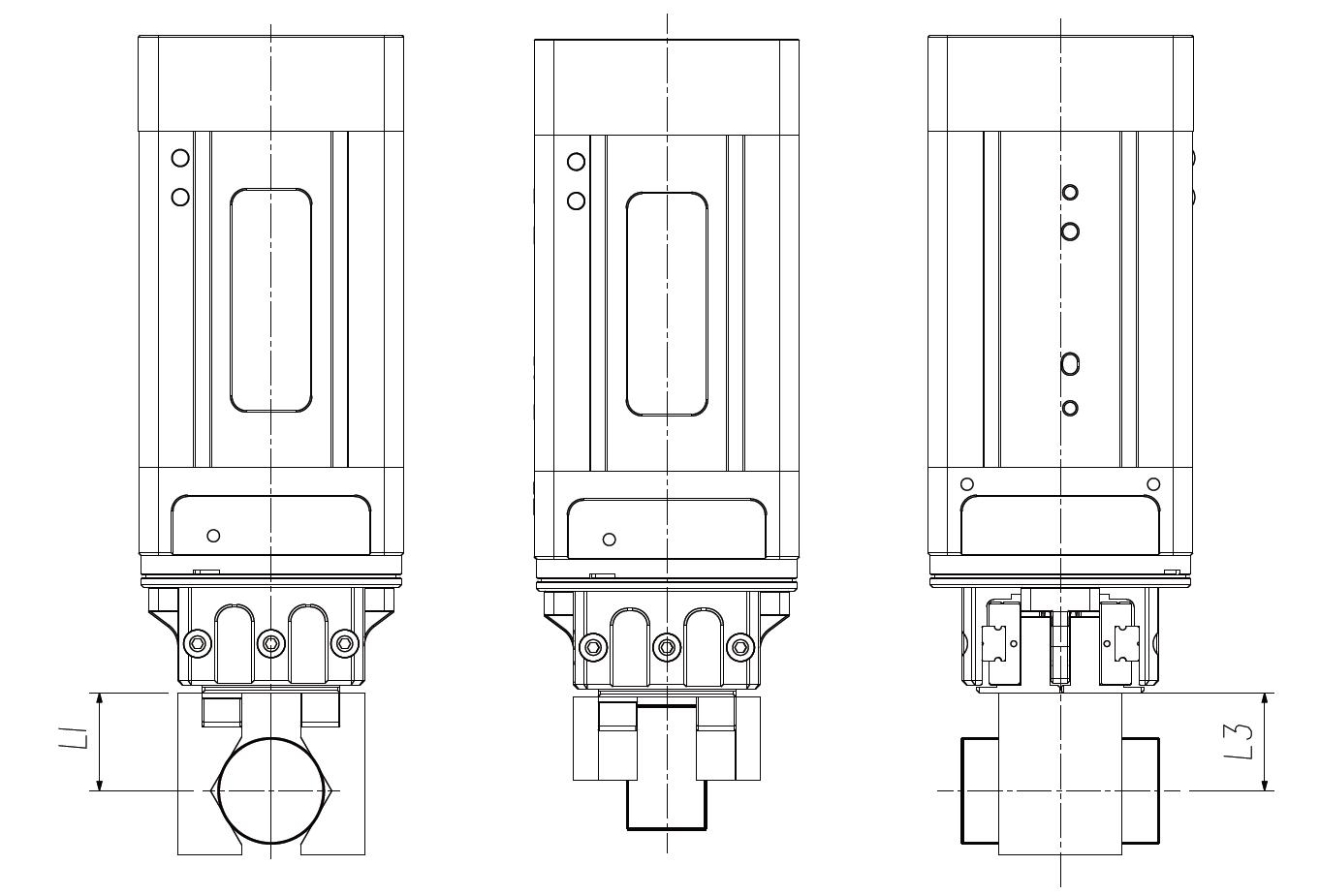
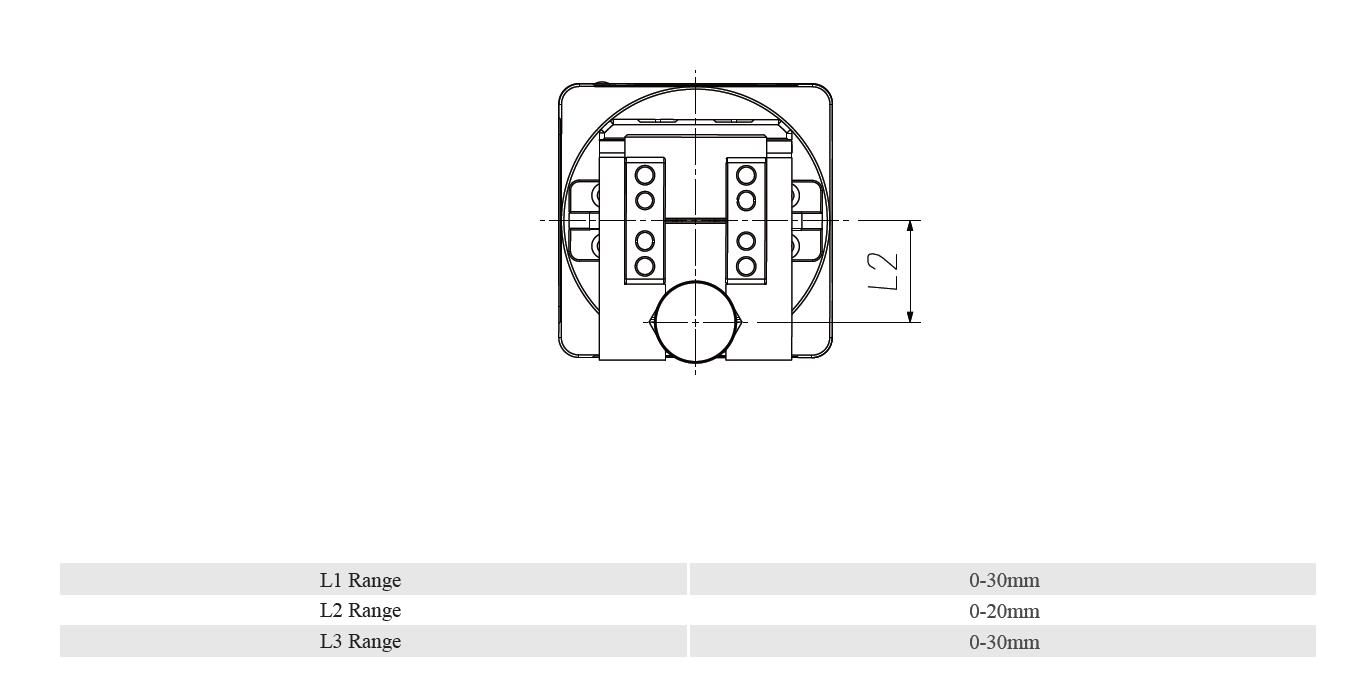
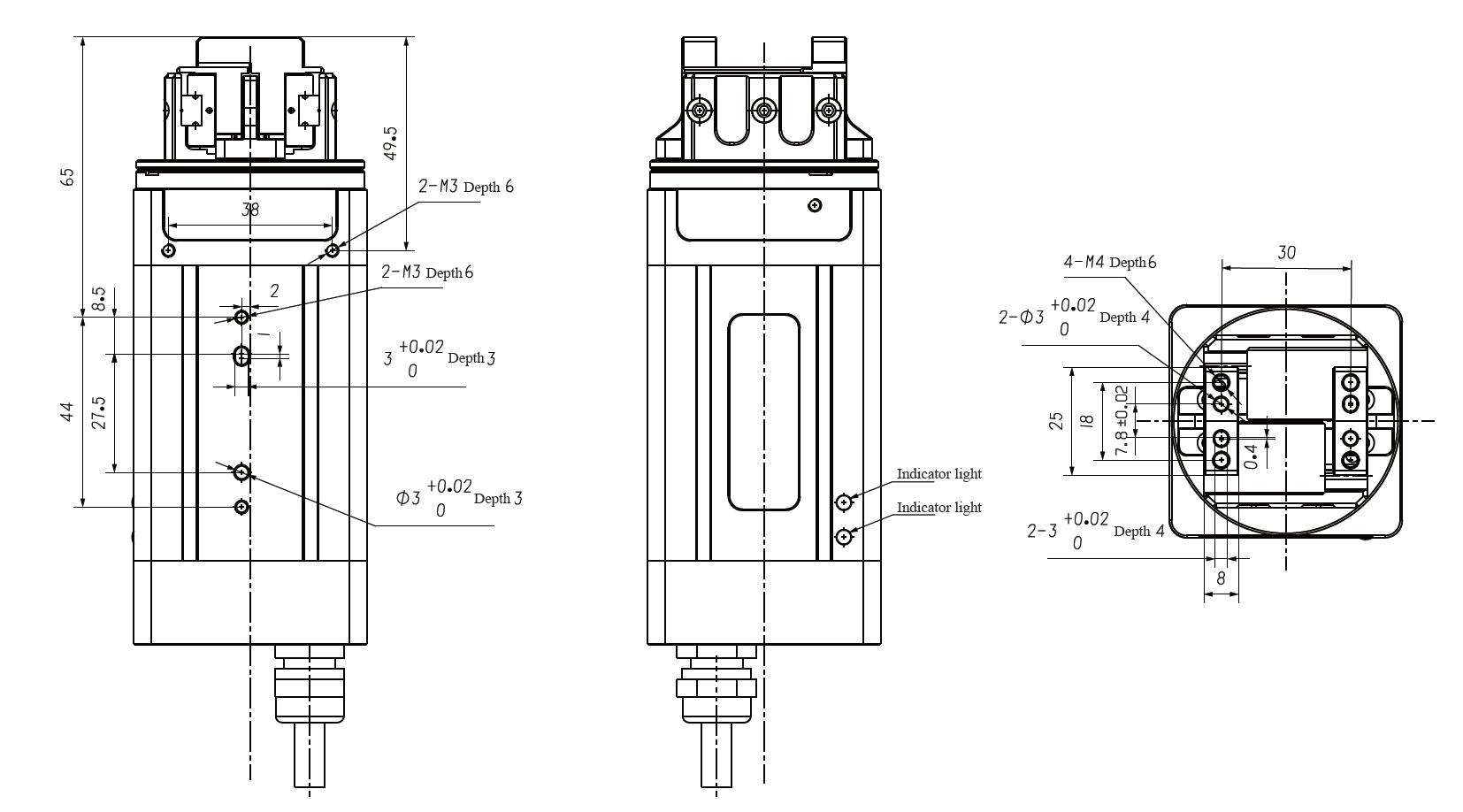
Diagramma di installazione dimensionale
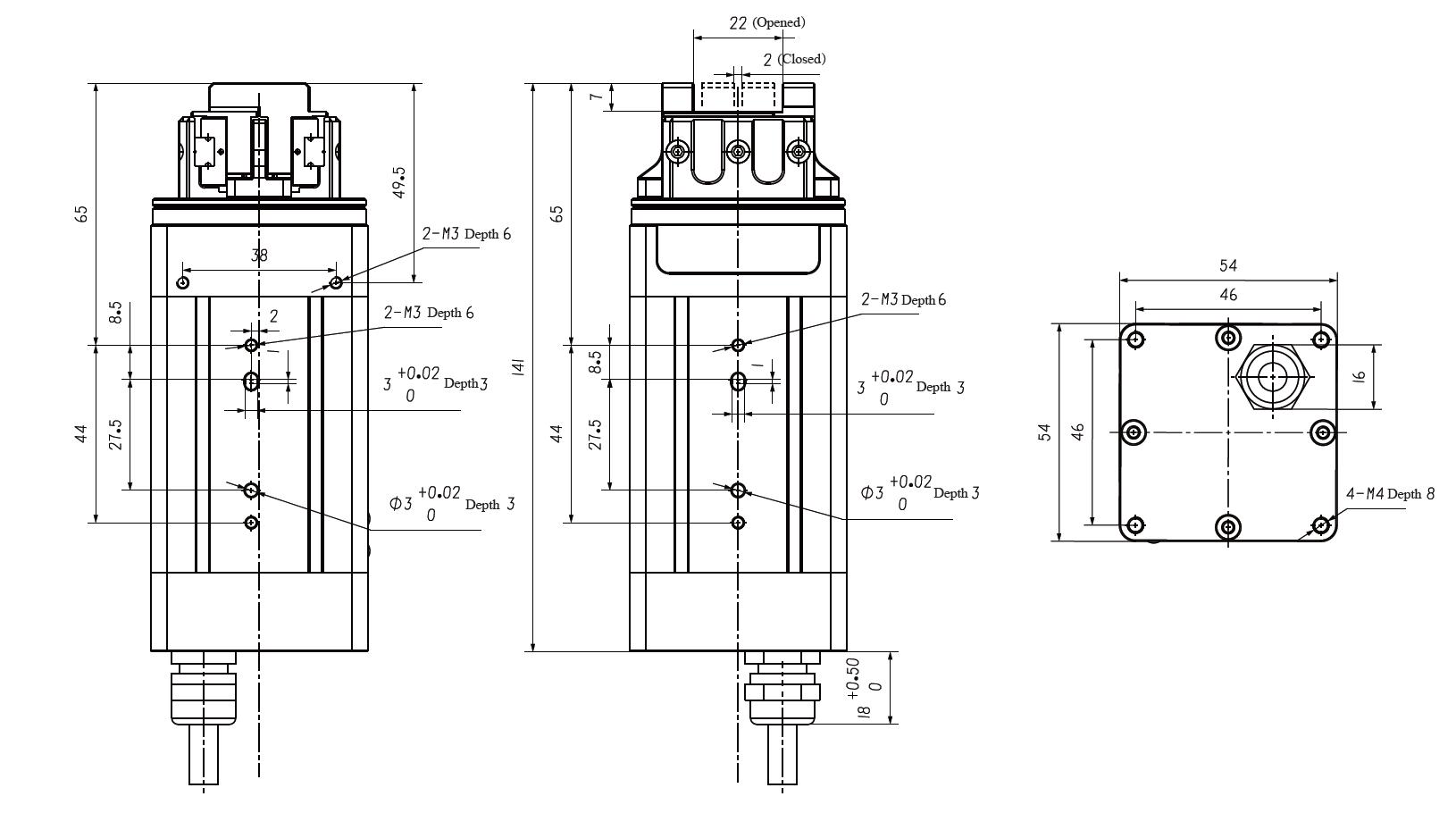
① RKMV8-354 Spina aeronautica a cinque poli per RKMV8-354
② La corsa della pinza elettrica è di 20 mm
③ Posizione di installazione, utilizzare due viti M6 per collegare la flangia all'estremità del braccio robotico UR
④ Posizione di installazione, posizione di installazione dell'apparecchio (vite M6)
⑤ Posizione di installazione, posizione di installazione dell'apparecchio (3 fori per perni cilindrici)
La nostra attività







