SERIE DI PINZE ELETTRICHE HITBOT – Pinza elettrica collaborativa Z-EFG-R



Categoria principale
Braccio robotico industriale / Braccio robotico collaborativo / Pinza elettrica / Attuatore intelligente / Soluzioni di automazione
Applicazione
Le pinze robotiche SCIC della serie Z-EFG sono di piccole dimensioni e dotate di un servosistema integrato, che consente un controllo preciso di velocità, posizione e forza di serraggio. Il sistema di presa all'avanguardia SCIC per soluzioni di automazione vi aprirà nuove possibilità di automazione per attività che non avreste mai pensato possibili.

Caratteristica

·Una pinza elettrica con servomotore piccola ma potente.
·I terminali possono essere sostituiti per soddisfare diversi requisiti di progetto.
·Potrebbe raccogliere oggetti fragili e deformabili, come uova, provette, anelli, ecc.
·Adatto per scene senza fonti d'aria (come laboratori e ospedali).
Sistema servo integrato applicato per varie richieste
Grande forza di serraggio
Forza di serraggio: 80N,
corsa: 20mm
Controllo di precisione
Ripetibilità: ±0,02 mm
Plug and Play
Progettato appositamente perpinza elettrica a sei assi
Il controller è integrato
Copertura di piccole superfici, comoda da integrare.
La coda può essere cambiata
La sua coda può essere modificata per essere applicata a diverse richieste.
Morsetto morbido
Può bloccare gli oggetti fragili

● Promuovere una rivoluzione nella sostituzione delle pinze pneumatiche con pinze elettriche, la prima pinza elettrica con sistema servo integrato in Cina.
● Sostituzione perfetta per compressore d'aria + filtro + elettrovalvola + valvola a farfalla + pinza pneumatica
● Durata di servizio di più cicli, coerente con il tradizionale cilindro giapponese




Parametro di specifica
La Z-EFG-R è una pinza elettrica robotica con controller integrato e molteplici funzioni in un'unica unità. Di piccole dimensioni, ma potente nelle funzioni.
● Una pinza elettrica con servomotore piccola ma potente.
●I terminali possono essere sostituiti per soddisfare diversi requisiti di progetto.
● Potrebbe raccogliere oggetti fragili e deformabili, come uova, provette, anelli, ecc.
● Adatto per scene senza fonti d'aria (come laboratori e ospedali).
Z-EFG-R è una piccola pinza elettrica dotata di un sistema servo integrato, che può sostituire pompa + filtro + elettromagnete + valvola a farfalla + pinza pneumatica.
| Modello n. Z-EFG-R | Parametri |
| Corsa totale | 20 millimetri |
| Forza di presa | 80N |
| Ripetibilità | ±0,02 mm |
| Peso di presa consigliato | 0,8 kg |
| Modalità di trasmissione | Cremagliera + guida a rulli incrociati |
| Rifornimento di grasso dei componenti mobili | Ogni sei mesi o 1 milione di movimenti / volta |
| Tempo di movimento della corsa unidirezionale | 0,45 secondi |
| Intervallo di temperatura di esercizio | 5-55℃ |
| Intervallo di umidità operativa | RH35-80 (No frost) |
| Modalità di movimento | Due dita si muovono orizzontalmente |
| Controllo dell'ictus | Regolabile |
| Regolazione della forza di serraggio | Regolabile |
| Peso | 0,5 kg |
| Dimensioni (L*W*H) | 68*68*132,7 mm |
| Posizionamento del controller | Incorporato |
| Energia | 5W |
| Tipo di motore | DC senza spazzole |
| Tensione nominale | 24V |
| Corrente di picco | 1A |
| Braccio robotico adattabile a sei assi | UR, Aubo |
La guida e il controller sono integrati
Z-EFG-R è una piccola pinza elettrica dotata di servosistema integrato, che può sostituire pompa dell'aria + filtro + valvola elettromagnetica + valvola a farfalla + pinza pneumatica.


Compatibile con il braccio robotico a sei assi
La pinza può essere compatibile con il braccio robotico a sei assi più diffuso, per realizzare il plug and play, ha una corsa lunga 20 mm, una forza di serraggio di 80 N e la sua corsa e forza di serraggio possono essere regolate.
Piccola figura, flessibile da installare
Le dimensioni di Z-EFG-R sono L68*W68*H132,7mm, la sua struttura è compatta, supporta metodi di installazione multipla, il controller è integrato, occupa poco spazio, è facile da applicare per varie richieste di attività di serraggio.

Rapidità di reazione, controllo della precisione
Il tempo di movimento più breve di una singola corsa è di 0,45 s, la sua ripetibilità è di ±0,02 mm, la sua parte posteriore può essere cambiata facilmente, i clienti possono bloccare l'oggetto secondo le richieste.
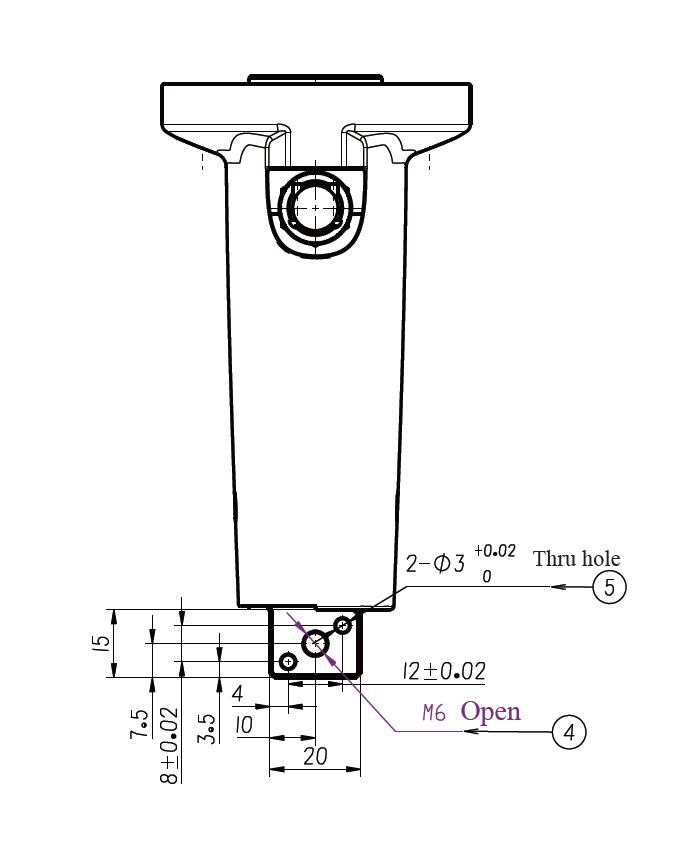
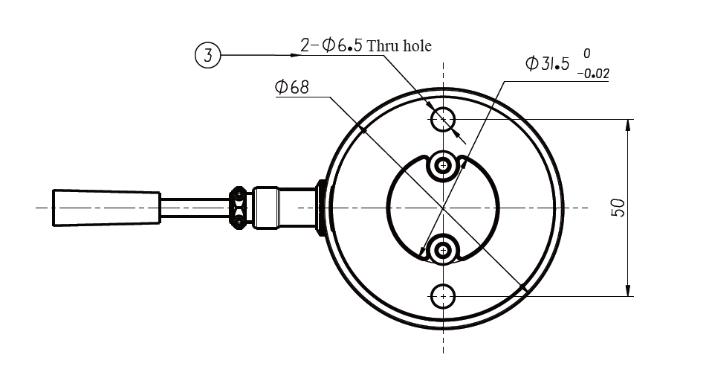
Diagramma di installazione dimensionale
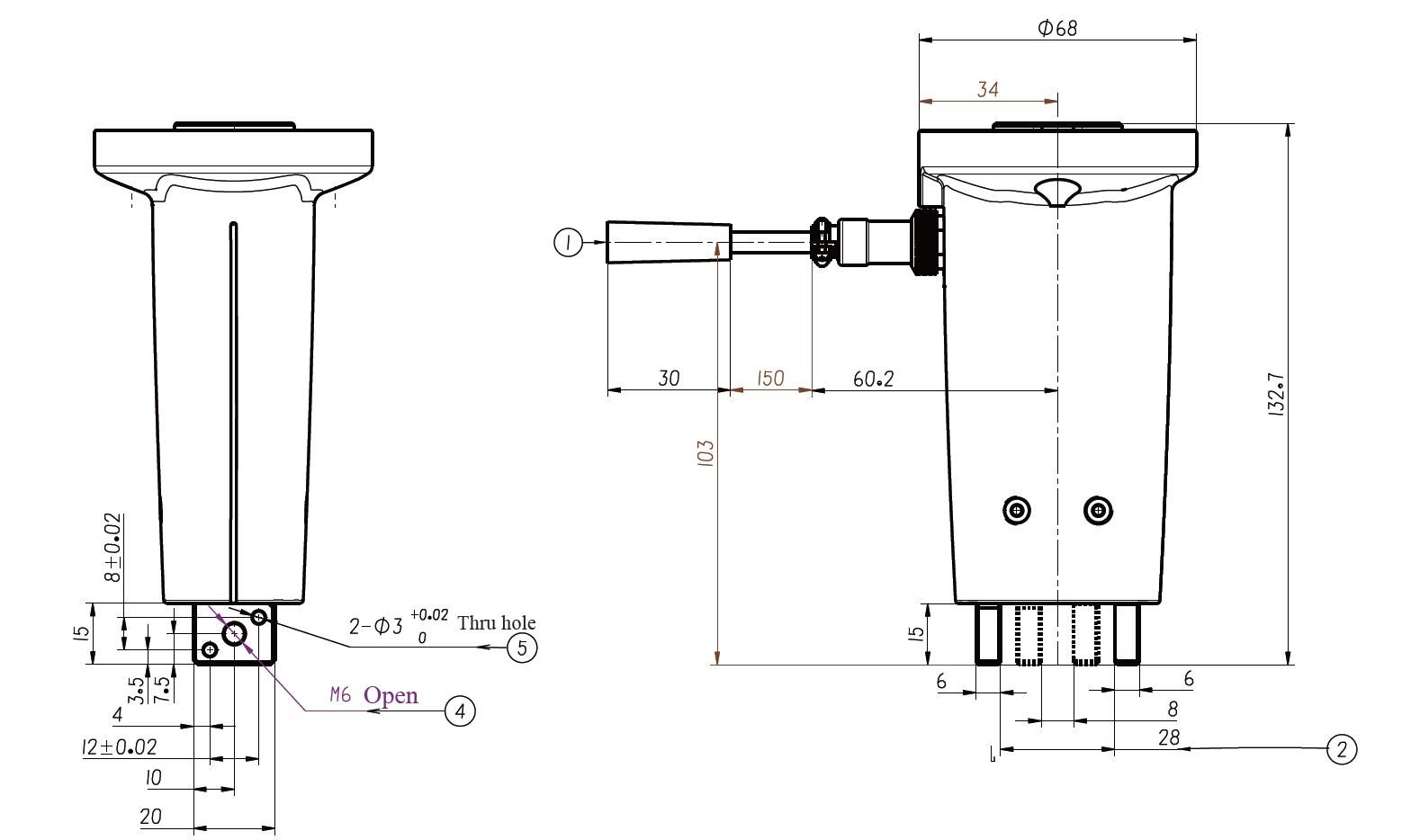
① RKMV8-354 Spina aeronautica a cinque poli per RKMV8-354
② La corsa della pinza elettrica è di 20 mm
③ Posizione di installazione, utilizzare due viti M6 per collegare la flangia all'estremità del braccio robotico UR
④ Posizione di installazione, posizione di installazione dell'apparecchio (vite M6)
⑤ Posizione di installazione, posizione di installazione dell'apparecchio (3 fori per perni cilindrici)
Parametri elettrici
Tensione nominale 24±2V
Corrente 0,4A

La nostra attività







