SERIE DI PINZE ELETTRICHE HITBOT – Pinza elettrica collaborativa Z-EFG-C50




Categoria principale
Braccio robotico industriale / Braccio robotico collaborativo / Pinza elettrica / Attuatore intelligente / Soluzioni di automazione
Applicazione
Le pinze robotiche SCIC della serie Z-EFG sono di piccole dimensioni e dotate di un servosistema integrato, che consente un controllo preciso di velocità, posizione e forza di serraggio. Il sistema di presa all'avanguardia SCIC per soluzioni di automazione vi aprirà nuove possibilità di automazione per attività che non avreste mai pensato possibili.

Caratteristica

·Rilevamento caduta pinza, funzione di uscita area
·Forza, posizione e velocità possono essere controllate con precisione tramite Modbus
·Lunga durata: decine di milioni di cicli, superando gli artigli pneumatici
·Controller integrato: ingombro ridotto, facile integrazione
·Modalità di controllo: 485 (Modbus RTU), I/O
Corsa 50 mm, forza di serraggio 140 N, compatibile con braccio robotico a 6 assi.
Alta frequenza
Il tempo di corsa più breve è 0,5 s
Alta precisione
La ripetibilità è ±0,03 mm
Carico utile elevato
Peso di serraggio raccomandato ≤2 kg
Plug and Play
Pinza elettrica specifica per braccio robotico a 6 assi
Coda intercambiabile
La sua coda è mutevole, adatta a diverse richieste
Forza di serraggio morbida
Può bloccare oggetti fragili e deformati

● Promuovere una rivoluzione nella sostituzione delle pinze pneumatiche con pinze elettriche, la prima pinza elettrica con sistema servo integrato in Cina.
● Sostituzione perfetta per compressore d'aria + filtro + elettrovalvola + valvola a farfalla + pinza pneumatica
● Durata di servizio di più cicli, coerente con il tradizionale cilindro giapponese



Parametro di specifica
| Modello n. Z-EFG-C50 | Parametri |
| Corsa totale | 50 mm regolabile |
| Forza di presa | 40-140N regolabile |
| Ripetibilità | ±0,03 mm |
| Peso di presa consigliato | ≤2 kg |
| Modalità di trasmissione | Cremagliera + Guida sferica |
| Rifornimento di grasso dei componenti mobili | Ogni sei mesi o 1 milione di movimenti / volta |
| Tempo di movimento della corsa unidirezionale | 0,5 secondi |
| Modalità di movimento | Due dita si muovono orizzontalmente |
| Peso | 1 kg |
| Dimensioni (L*W*H) | 72*72*143mm |
| Tensione di esercizio | 24 V ± 10% |
| Corrente nominale | 0,8 A |
| Corrente di picco | 2A |
| Energia | 20W |
| Classe di protezione | IP20 |
| Tipo di motore | DC senza spazzole |
| Intervallo di temperatura di esercizio | 5-55℃ |
| Intervallo di umidità operativa | RH35-80 (No frost) |

| Carico statico ammissibile in direzione verticale | |
| Fz: | 300N |
| Coppia ammissibile | |
| Mx: | 7 Nm |
| Mio: | 7 Nm |
| Mz: | 7 Nm |
Guida e controllo integrati
La pinza elettrica Z-EFG-C50 è dotata di un servosistema integrato al suo interno, la sua corsa totale è di 50 mm, la forza di serraggio è di 40-140 N, la sua corsa e la sua forza di serraggio sono regolabili e la sua ripetibilità è di ±0,03 mm.

Compatibile con il braccio robotico a sei assi

La pinza elettrica può essere compatibile con il braccio robotico a 6 assi, per realizzare il plug and play, il suo tempo di corsa più breve è di soli 0,5 secondi, il che può soddisfare le richieste di serraggio per una linea di produzione stabile.
Piccole dimensioni, installazione flessibile

Z-EFG-C50 adotta la modalità di trasmissione della cremagliera + guida a sfere, le dimensioni del prodotto sono L72*W72*H143mm, può essere flessibile per essere sistemato in condizioni di piccola area.


Reazione rapida, precisione per il controllo della forza

Il tempo di corsa singolo più breve è di soli 0,5 secondi, può gestire attività di serraggio rapido, le sue parti posteriori possono essere sostituite in qualsiasi momento, i clienti possono regolare le code in base alle esigenze.
Molteplici modalità di controllo, facile da usare

La configurazione di Z-EFG-C50 è semplice, dispone di numerose modalità di controllo, tra cui 485 (Modbus RTU), Pulse, I/O, ed è compatibile con il sistema di controllo principale del PLC.

Offset del baricentro del carico
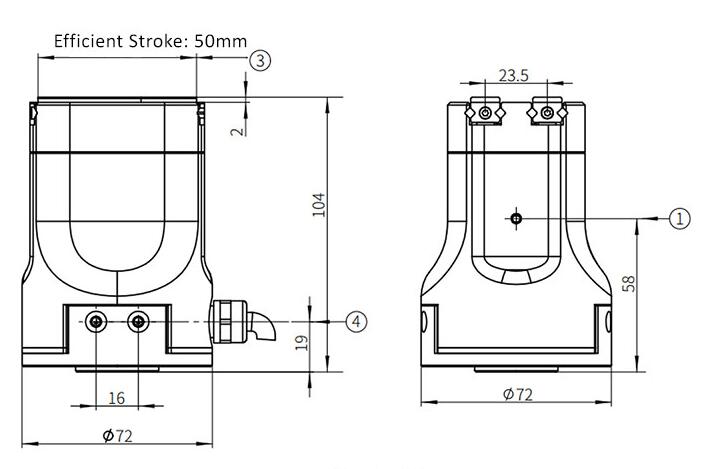
1. Indicatore LED
2. Sito di installazione, utilizzare 4 viti M4
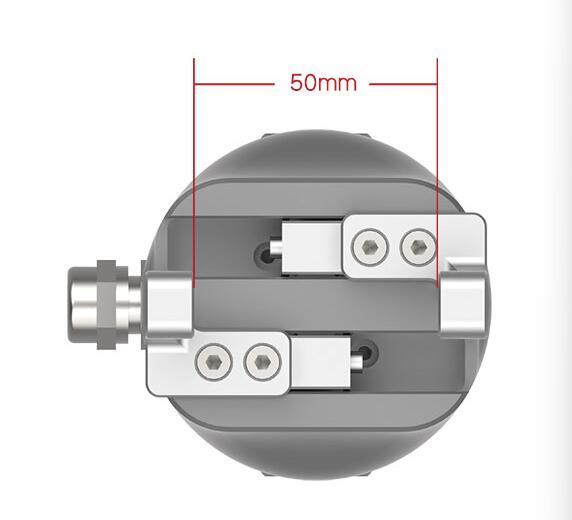
3. La corsa della pinza elettrica è di 50 mm
4. Uscita del dado
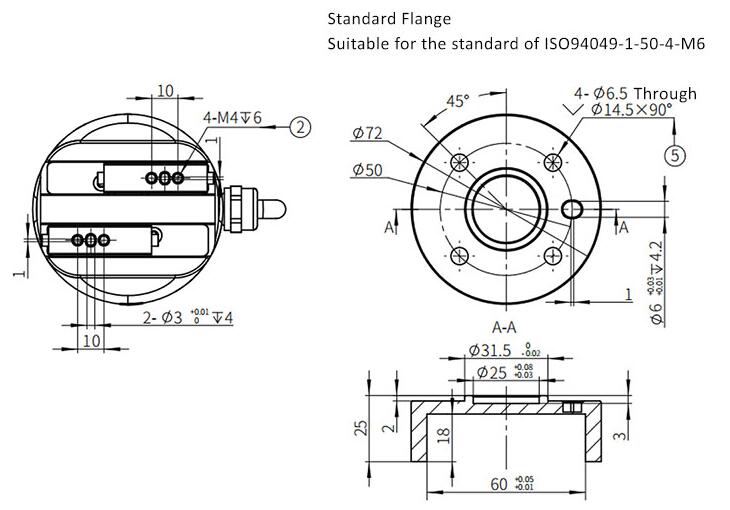
5. Sito di installazione, utilizzare 4 viti M6 per il collegamento alla flangia terminale del braccio robotico collaborativo
La nostra attività







