SERIE DI PINZE ELETTRICHE HITBOT – Pinza elettrica collaborativa Z-EFG-L



Categoria principale
Braccio robotico industriale / Braccio robotico collaborativo / Pinza elettrica / Attuatore intelligente / Soluzioni di automazione
Applicazione
Le pinze robotiche SCIC della serie Z-EFG sono di piccole dimensioni e dotate di un servosistema integrato, che consente un controllo preciso di velocità, posizione e forza di serraggio. Il sistema di presa all'avanguardia SCIC per soluzioni di automazione vi aprirà nuove possibilità di automazione per attività che non avreste mai pensato possibili.

Caratteristica

·Apertura e chiusura rapida
· Presa in spazi ristretti, presa di merci fragili
· Esclusiva pinza elettrica con corsa da 8 mm per braccio robotico a sei assi
· Lunga durata: decine di milioni di cicli, superando gli artigli pneumatici
·Controller integrato: ingombro ridotto, facile integrazione
·Modalità di controllo: ingresso e uscita I/O
Design speciale per braccio robotico a sei assi, pinza elettrica con corsa da 12 mm
Plug and Play
Design speciale per braccio robotico a sei assi
Alta frequenza
Il tempo più breve di un singolo colpo è di soli 0,2 secondi
Guida e controllo integrati
Sistema servo integrato, plug and play
Il controller è integrato
Occupa poco spazio, è comodo da integrare.
La coda può essere cambiata
La sua coda può essere modificata per soddisfare diverse esigenze.
Morsetto morbido
Può bloccare gli oggetti fragili

● Promuovere una rivoluzione nella sostituzione delle pinze pneumatiche con pinze elettriche, la prima pinza elettrica con sistema servo integrato in Cina.
● Sostituzione perfetta per compressore d'aria + filtro + elettrovalvola + valvola a farfalla + pinza pneumatica
● Durata di servizio di più cicli, coerente con il tradizionale cilindro giapponese




Parametro di specifica
Z-EFG-L è una pinza parallela elettrica robotica a 2 dita con una forza di presa di 30 N, che supporta il serraggio morbido, come la presa di uova, pane, tubi per capezzoli, ecc.
| Modello n. Z-EFG-L | Parametri |
| Corsa totale | 12 millimetri |
| Forza di presa | 30N |
| Ripetibilità | ±0,02 mm |
| Peso di presa consigliato | ≤0,5 kg |
| Modalità di trasmissione | Cremagliera + guida a rulli incrociati |
| Rifornimento di grasso dei componenti mobili | Ogni sei mesi o 1 milione di movimenti / volta |
| Tempo di movimento della corsa unidirezionale | 0,2 secondi |
| Intervallo di temperatura di esercizio | 5-55℃ |
| Intervallo di umidità operativa | RH35-80 (No frost) |
| Modalità di movimento | Due dita si muovono orizzontalmente |
| Controllo dell'ictus | Non regolabile |
| Regolazione della forza di serraggio | Non regolabile |
| Peso | 0,4 kg |
| Dimensioni (L*W*H) | 68*68*113,6 mm |
| Posizionamento del controller | Incorporato |
| Energia | 5W |
| Tipo di motore | DC senza spazzole |
| Tensione nominale | 24 V ± 10% |
| Corrente di picco | 1A |
| Braccio robotico adattabile a sei assi | UR, Aubo |
Braccio robotico a sei assi, plug and play
La pinza elettrica Z-EFG-L è compatibile con i principali bracci robotici collaborativi presenti sul mercato, ha un elevato grado di protezione e una grande capacità di carico.


Guida e controllo integrati
Z-EFG-L è una piccola pinza elettrica dotata di servosistema integrato, ha una corsa di 12 mm, una forza di serraggio di 30 N, una Z-EFG-L può sostituire un compressore d'aria + filtro + valvola magnetica elettronica + valvola a farfalla + pinza pneumatica.
Piccola figura, flessibile da installare
Le dimensioni della pinza elettrica Z-EFG-L sono L68*W68*H113,6 mm, la sua struttura è compatta, supporta molteplici modalità di installazione, il suo controller è integrato, occupa poco spazio, può essere facilmente gestito per vari requisiti per le attività di serraggio.


Rapidità di reazione, controllo della precisione
Il tempo di corsa singolo più breve è di 0,45 s, la parte posteriore può essere sostituita facilmente, i clienti possono essere flessibili nel regolare la pinza elettrica in base alle loro esigenze di produzione.
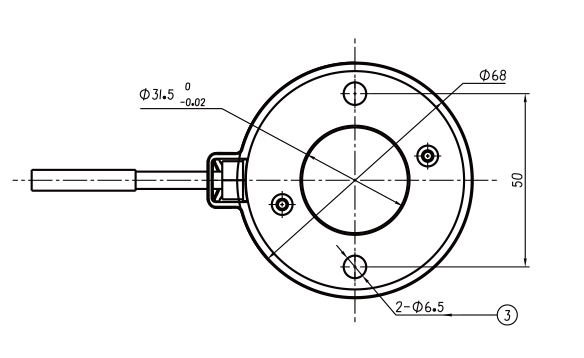
Diagramma di installazione dimensionale
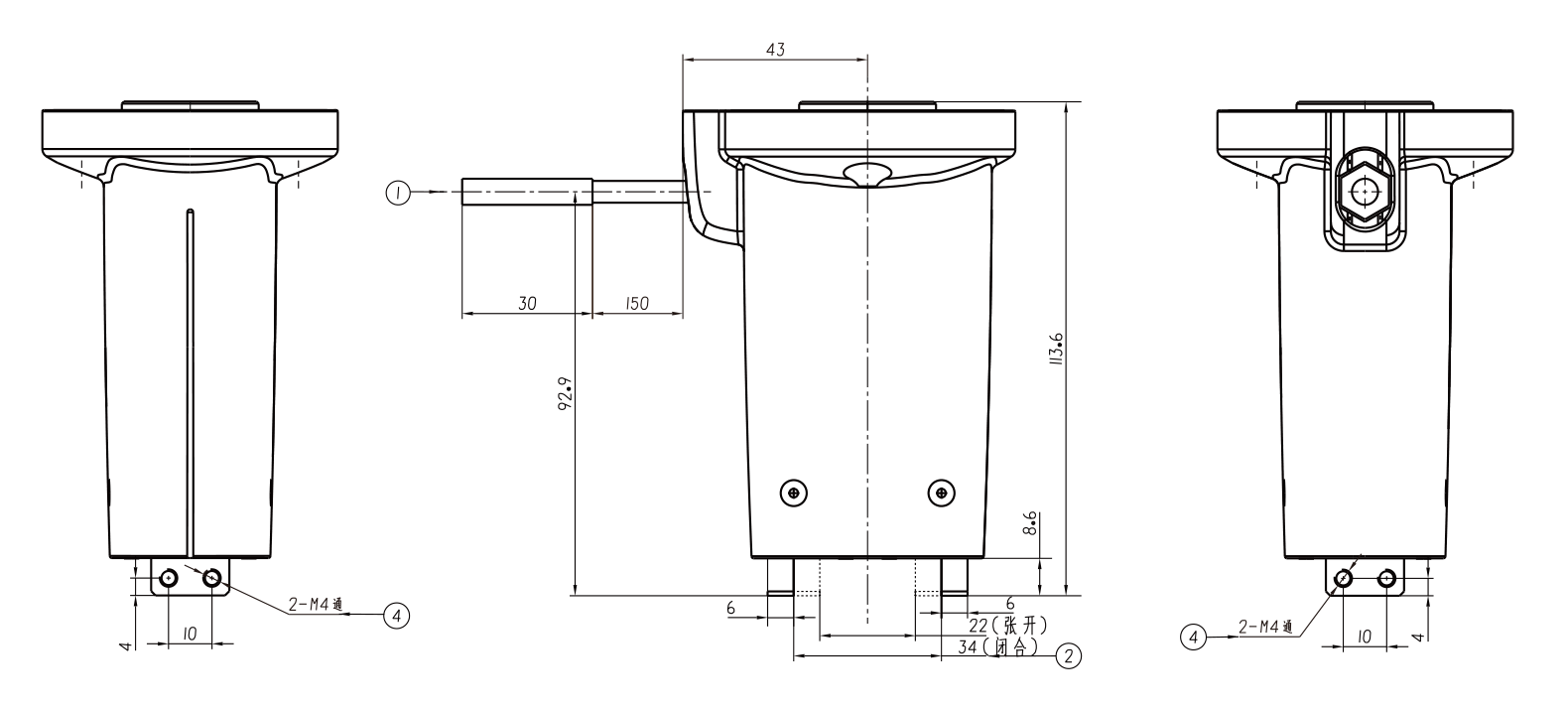
① RKMV8-354 Spina aeronautica a cinque poli per RKMV8-354
② La corsa della pinza elettrica è qwmm
③ Posizione di installazione, utilizzare due viti M6 per collegare la flangia all'estremità del braccio robotico UR
④ Posizione di installazione, posizione di installazione dell'apparecchio (vite M6)
Parametri elettrici
Tensione nominale 24±2V
Corrente 0,4A

La nostra attività







