SCARA ROBOTIC ARMS – Braccio robotico collaborativo Z-Arm-4160B





Categoria principale
Braccio robotico industriale / Braccio robotico collaborativo / Pinza elettrica / Attuatore intelligente / Soluzioni di automazione
Applicazione
I cobot SCIC Z-Arm sono robot collaborativi leggeri a 4 assi con motore di azionamento integrato e non richiedono più riduttori come gli altri scara tradizionali, riducendo i costi del 40%. I cobot SCIC Z-Arm possono svolgere funzioni che includono, a titolo esemplificativo ma non esaustivo, stampa 3D, movimentazione materiali, saldatura e incisione laser. Sono in grado di migliorare notevolmente l'efficienza e la flessibilità del lavoro e della produzione.
Caratteristiche

Alta precisione
Ripetibilità
±0,02 mm
Asse Z personalizzato
0,1-0,8 m
Grande carico utile
Supporto 4 kg
Massimo 5 kg
Velocità più elevata
Velocità lineare massima 2 m/s
(Carico massimo 5 kg)
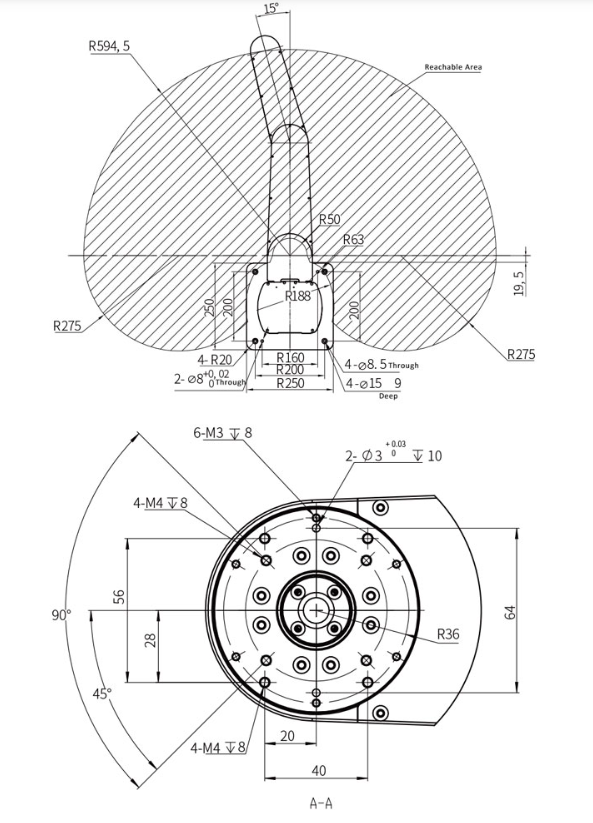
Braccio robotico a 4 assi ad alta precisione e con ampia apertura del braccio, facile da usare
Alta precisione
Ripetibilità: ±0,02 mm
Grande apertura delle braccia
Asse J1: 325 mm,Asse J2: 275 mm
Asse Z personalizzato
La corsa su-giù può essere personalizzata tra 0,1 m-0,8 m
Salvaspazio
Unità/Controller integrato
Semplice e facile da usare
Anche i principianti che non conoscono il braccio robotico possono usarlo facilmente, grazie all'interfaccia intuitiva.
Ad alta velocità
La sua velocità è di 2000 mm/s sotto il carico di 4 kg

Prodotti correlati



Parametro di specifica
Progettato da SCIC Tech, il robot collaborativo SCIC Hitbot Z-Arm 4160B è leggero, facile da programmare e utilizzare e supporta l'SDK. Inoltre, supporta il rilevamento delle collisioni, ovvero si arresta automaticamente in caso di contatto con l'uomo, garantendo una collaborazione uomo-macchina intelligente e un elevato livello di sicurezza.
| Braccio robotico collaborativo Z-Arm 4160B | Parametri |
| Lunghezza del braccio a 1 asse | 325 mm |
| Angolo di rotazione di 1 asse | ±90° |
| Lunghezza del braccio a 2 assi | 275 millimetri |
| Angolo di rotazione a 2 assi | ±164° Opzionale: 15-345 gradi |
| Corsa dell'asse Z | 410 L'altezza può essere personalizzata |
| Intervallo di rotazione dell'asse R | ±1080° |
| Velocità lineare | 2000 mm/s (carico utile 4 kg) |
| Ripetibilità | ±0,02 mm |
| Carico utile standard | 4 kg |
| Carico utile massimo | 5 kg |
| Grado di libertà | 4 |
| Alimentazione elettrica | 220V/110V50-60HZ adattabile a 48VDC potenza di picco 960W |
| Comunicazione | Ethernet |
| Espandibilità | Il controller di movimento integrato integrato fornisce 24 I/O + espansione sotto il braccio |
| L'asse Z può essere personalizzato in altezza | 0,1 m~0,8 m |
| Insegnamento del trascinamento dell'asse Z | / |
| Interfaccia elettrica riservata | Configurazione standard: cavi 24*23awg (non schermati) dal pannello della presa attraverso la copertura del braccio inferiore Opzionale: 2 tubi a vuoto φ4 attraverso il pannello della presa e la flangia |
| Pinze elettriche HITBOT compatibili | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Luce respirante | / |
| Gamma di movimento del secondo braccio | Standard: ±164° Opzionale: 15-345 gradi |
| Accessori opzionali | / |
| Utilizzare l'ambiente | Temperatura ambiente: 0-45°C Umidità: 20-80% RH (senza gelo) |
| Ingresso digitale porta I/O (isolato) | 9+3+estensione dell'avambraccio (facoltativo) |
| Uscita digitale della porta I/O (isolata) | 9+3+estensione dell'avambraccio (facoltativo) |
| Ingresso analogico porta I/O (4-20 mA) | / |
| Uscita analogica della porta I/O (4-20 mA) | / |
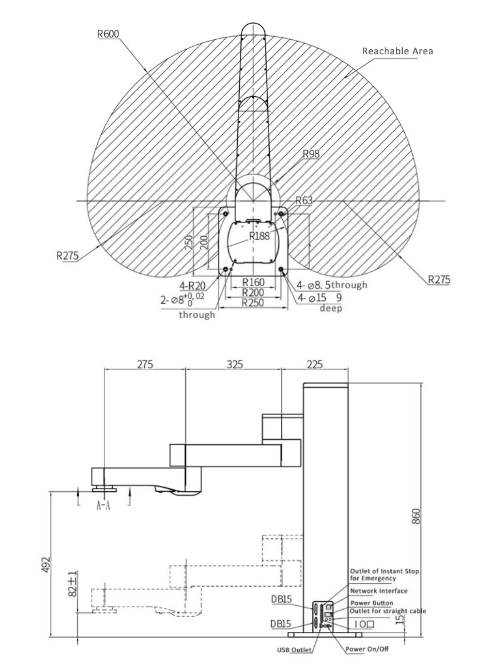
| Altezza del braccio robotico | 860 millimetri |
| Peso del braccio robotico | Corsa 410 mm, peso netto 36,5 kg |
| Dimensione della base | 250 mm*250 mm*15 mm |
| Distanza tra i fori di fissaggio della base | 200mm*200mm con quattro viti M8*20 |
| Rilevamento delle collisioni | √ |
| Insegnamento del drag | √ |
Scelta ideale per attività di assemblaggio leggere
Z-Arm XX60B è un braccio robotico a 4 assi con ampia apertura, che occupa una piccola area, molto adatto per essere posizionato sulla postazione di lavoro o all'interno di una macchina, è la scelta ideale per attività di assemblaggio leggere.


Leggero con ampio angolo di rotazione

Il peso del prodotto è di circa 36,5 kg, il carico massimo può arrivare fino a 5 kg, l'angolo di rotazione di 1 asse è di ±90°, l'angolo di rotazione di 2 assi è di ±164°, l'intervallo di rotazione dell'asse R può arrivare fino a ±1080°.
Grande apertura del braccio, ampia applicazione

Il braccio Z-Arm XX60B ha un'ampia apertura del braccio, la lunghezza del 1° asse è di 325 mm, la lunghezza del 2° asse è di 275 mm, la sua velocità lineare può arrivare fino a 2000 mm/s sotto un carico di 4 kg.


Flessibile da implementare, veloce da cambiare
Il braccio Z XX60B ha le caratteristiche di leggerezza, ingombro ridotto e flessibilità di implementazione, è adatto all'impiego in numerose applicazioni e non modifica il precedente layout di produzione, inclusa la rapidità nel cambiare la sequenza di processo e nel completare piccoli lotti di produzione, ecc.
Trascina Teaching per completare il programma

Il software si basa sulla progettazione grafica, ha fornito punti, segnali di uscita, pinze elettriche, vassoi, ritardi, sottoprocessi, reset e altri moduli funzionali di base; gli utenti possono trascinare il modulo per controllare il braccio del robot nell'area di programmazione; l'interfaccia è semplice, ma la funzione è potente.
Versione Motion Range M1 (Ruota verso l'esterno)
Raccomandazione del connettore DB15

Modello consigliato: Maschio placcato oro con guscio in ABS YL-SCD-15M Femmina placcata oro con guscio in ABS YL-SCD-15F
Descrizione delle dimensioni: 55 mm * 43 mm * 16 mm
(Fare riferimento alla Figura 5)
Diagramma dell'ambiente di utilizzo esterno del braccio robotico

La nostra attività


Categorie di prodotti
-

SERIE QUICK CHANGER – QC-150 Round Manua...
-

ROBOT DI SOLLEVAMENTO – Robot di sollevamento rotante SJV...
-

CARRELLO ELEVATORE INTELLIGENTE – SFL-CDD14-CE Laser SLAM ...
-

SERIE TM AI COBOT – Cobot AI a 6 assi TM12M
-

SERIE TM AI COBOT – Cobot AI a 6 assi TM16M
-

PINZE ELETTRICHE SERIE HITBOT – Z-EFG-30 Paral...