SERIE QUICK CHANGER – QCA-25 Un dispositivo di cambio rapido all'estremità di un robot



Categoria principale
Cambio utensile robotizzato / Cambio utensile di estremità del braccio (EOAT) / Sistema di cambio rapido / Cambio utensile automatico / Interfaccia utensili robotizzati / Lato robot / Lato pinza / Flessibilità utensili / Sgancio rapido / Cambio utensile pneumatico / Cambio utensile elettrico / Cambio utensile idraulico / Cambio utensile di precisione / Meccanismo di bloccaggio di sicurezza / End effector / Automazione / Efficienza del cambio utensile / Cambio utensile / Automazione industriale / Utensili di estremità del braccio robotizzati / Design modulare
Applicazione
Gli utensili di estremità (EOAT) sono ampiamente utilizzati in settori quali la produzione automobilistica, l'elettronica 3C, la logistica, lo stampaggio a iniezione, il confezionamento di prodotti alimentari e farmaceutici e la lavorazione dei metalli. Le sue funzioni principali includono la movimentazione dei pezzi, la saldatura, la spruzzatura, l'ispezione e il cambio rapido degli utensili. Gli EOAT migliorano significativamente l'efficienza produttiva, la flessibilità e la qualità del prodotto, rendendoli una parte essenziale della moderna automazione industriale.
Caratteristica
Alta precisione
Il lato pinza di regolazione del pistone svolge la funzione di posizionamento, garantendo un'elevata precisione di posizionamento ripetuto. Test condotti su un milione di cicli dimostrano che la precisione effettiva è molto superiore al valore raccomandato.
Alta resistenza
Il pistone di bloccaggio con cilindro di grande diametro offre una forte forza di bloccaggio, mentre il dispositivo di estremità rapida del robot SCIC ha una forte capacità di resistenza alla coppia. Durante il bloccaggio, non si verificheranno vibrazioni dovute al movimento ad alta velocità, evitando così guasti al bloccaggio e garantendo una precisione di posizionamento costante.
Alte prestazioni
Per garantire il contatto ravvicinato del modulo di segnale, vengono adottati un meccanismo di bloccaggio con superficie multiconica, componenti di tenuta a lunga durata e una sonda di contatto elastica di alta qualità.



Parametro di specifica
| Serie Quick Changer | ||||
| Modello | Carico utile massimo | Percorso del gas | Forza di bloccaggio a 80 psi (5,5 bar) | Peso del prodotto |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

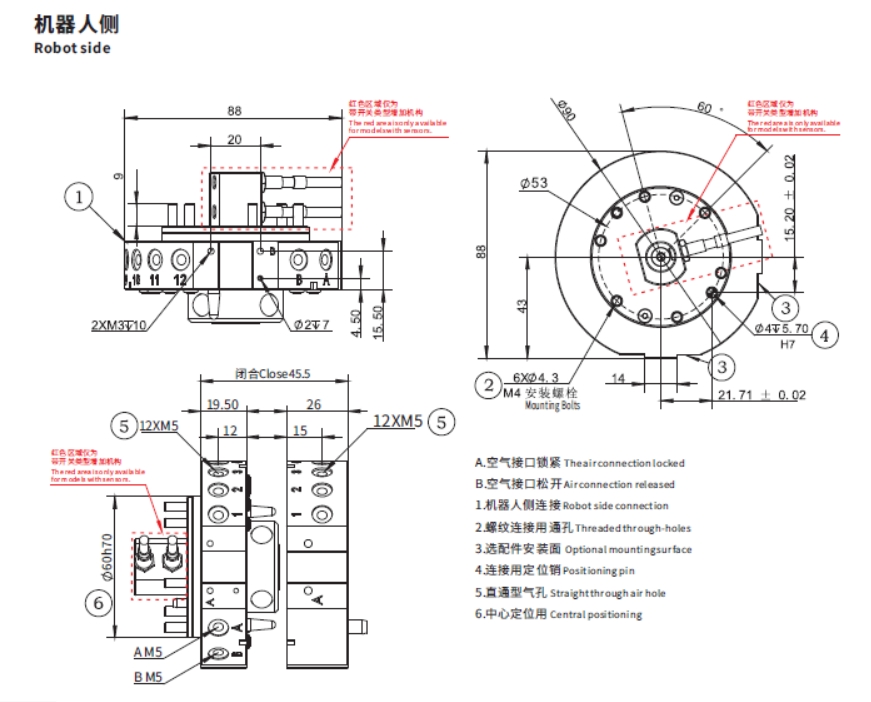
Lato robot

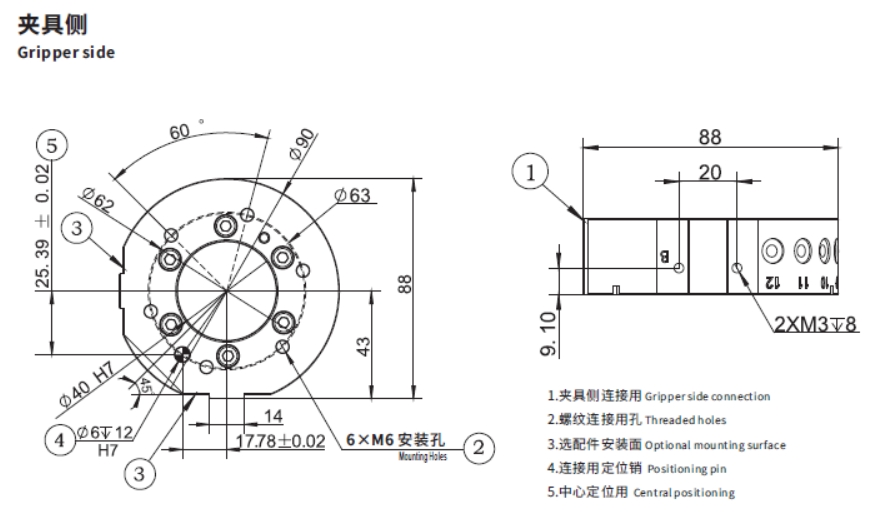
Lato pinza

Interruttore della cinghia laterale del robot
Modulo applicabile
Tipo di modulo
| Nome del prodotto | Modello | PN | Tensione di lavoro | Corrente di lavoro | Connettore | Connettore PN |
| Modulo di segnale lato robot | QCSM-15R1 | 7.Y00965 | 24V | 2,5A | DB15R1-1000① | 1.Y10163 |
| Modulo di segnale lato pinza | QCSM-15G1 | 7.Y00966 | 24V | 2,5A | DB15G1-1000① | 1.Y10437 |
①La lunghezza del cavo è di 1 metro
Modulo HF - linea diritta
| Nome del prodotto | Modello | PN |
| Modulo ad alta frequenza lato robot | QCHFM-02R-1000 | 7.Y02086 |
| Modulo ad alta frequenza lato pinza | QCHFM-02G-1000 | 7.Y02087 |
Modulo elettrico a 15 core - linea diritta
| Nome del prodotto | Modello | PN |
| Modulo elettrico a 15 nuclei lato robot | QCHFM-15R1-1000 | 7.Y02097 |
| Modulo elettrico a 15 conduttori lato pinza | QCHFM-15G1-1000 | 7.Y02098 |
Modulo di potenza - linea diritta
| Nome del prodotto | Modello | PN |
| Modulo ad alta frequenza lato robot | QCSM-08R-1000 | 7.Y02084 |
| Modulo ad alta frequenza lato pinza | QCSM-08G-1000 | 7.Y02085 |
Interfaccia cavo di rete RJ45S
| Nome del prodotto | Modello | PN |
| Modulo servo RJ455 lato robot | QCSM-RJ45*5M-06R | 7.Y02129 |
| Modulo servo RJ455 lato pinza | QCSM-RJ45*5M-06G | 7.Y02129 |
La nostra attività







